Real Time Kinematic
Layanan RTK merupakan layanan penentuan posisi teliti secara real-time. Sistem RTK GPS melibatkan penggunaan setidaknya dua receiver GPS, satu receiver yang dikenal sebagai base station dan satu receiver yang dikenal sebagai rover. Pada sistem RTK GPS, base station mendapatkan sinyal dari satelit GNSS dan membandingkannya dengan posisi yang diketahui dengan tepat di permukaan bumi. Base station kemudian mengirimkan data perbaikan (correction data) ke rover melalui saluran komunikasi seperti radio atau internet.
Dalam praktiknya koreksi RTK BIG dapat dikelompokkan kedalam 2 jenis yaitu koreksi single (nearest base) dan koreksi network (NRTK). Kualitas ketelitian dari koreksi single (nearest base) sangat bergantung dengan jarak rover terhadap base stasiun terdekat. Sebagai perhitungan berdasarkan desain teknis yang mengacu kepada koreksi single (nearest base) dalam kondisi ideal, ketelitian yang bisa dicapai dengan jenis koreksi ini adalah 10 mm + 1.0 ppm artinya ketelitian yang dicapai pada jarak baseline 1 km adalah 10 mm, sehingga jika jarak bertambah 1 km maka ketelitian akan menurun sebesar 1 mm seperti yang ditunjukkan pada tabel berikut :
|
Metode |
Akurasi |
Jarak |
|
|
|
|
|
5 km |
15 km |
30 km |
|
Real-Time |
10 mm + 1.0 ppm |
15 mm |
25 mm |
40 mm |
Dengan demikian berdasarkan desain teknis koreksi single (nearest base) diatas untuk mencapai ketelitian < 5 cm maka jarak baseline dari rover ke base harus < 50 km untuk ambiguitas fasenya fix, sedangkan jika nilai ambiguitas fasenya float maka ketelitian yang akan dicapai sekitar 20 cm.
Jenis layanan RTK BIG berikutnya adalah berbasis network (NRTK). Pada proses network RTK faktor faktor yang mempengaruhi ketelitian hasil koordinat seperti ionosfer, troposfer, dan orbit satelit dimodelkan dan diestimasi lalu diberikan ke rover dalam bentuk network correction. Rover dari pengguna yang menggunakan koreksi NRTK BIG akan menerima koreksi posisi maksimal 5 base dari sekitarnya, untuk selanjutnya dijadikan stasiun referensi. Proses pemecahan ambiguitas untuk mencapai konvergen dari segi kecepatan dan ketepatan, sangat lebih handal menggunakan network RTK sehingga hasil network RTK akan lebih baik dibandingkan dengan koreksi single (nearest base).
Pada layanan NRTK BIG pengguna dapat mengakses layanan dengan mendaftar terlebih dahulu ke dalam website nrtk.big.go.id . Setelah mendapatkan akun, pengguna dapat mendapatkan fasilitas koreksi dengan mengakses mount point sebagai berikut :
| Ntrip caster host name (IP) | : | nrtk.big.go.id |
| Ntrip caster port | : | 2001 |
Dengan terhubung pada mount point diatas pengguna akan mendapatkan beberapa pilihan koreksi yang dapat disesuaikan dengan kebutuhan survei dan pemetaan. Adapun pilihan koreksi beserta penjelasannya sebagai berikut :
- MAX (Master Auxiliary) adalah layanan koreksi network RTK, konsep dasarnya jarak-jarak fase dari masing-masing stasiun referensi (base) direduksi dalam level ambiguitas fase yang sama sehingga pada saat proses double difference dibentuk, maka nilai ambiguitas fase ini sudah terkurangkan. Langkah selanjutnya berdasarkan informasi posisi dari rover, dipilih stasiun-stasiun referensi paling sesuai sebagai base untuk rover yang bersangkutan. Stasiun referensi yang dipilih tersebut akan ditentukan satu master reference station dan sisanya sebagai auxiliary reference station. Master reference station dan auxiliary reference station menggunakan formasi dan transmisi RTCM untuk melakukan koreksi dan residual koreksi dengan demikian rover bisa melakukan penentuan posisi teliti. Adapun master reference station pada network MAX belum tentu stasiun terdekat dengan rover karena algoritma akan memilih kualitas data dari stasiun referensi yang layak dan terbaik untuk dijadikan master reference station

Gambar MAX (Master Auxiliary)

Gambar i-Max (Individualised Master Auxiliary)
- i-Max (Individualised Master Auxiliary) adalah layanan koreksi network RTK, konsep dasarnya hampir sama seperti pada layanan MAX yaitu proses double difference, selanjutnya pemilihan master reference station dan auxiliary reference station. Perbedaannya dengan MAX adalah koreksi network yang diterapkan pada rover berasal dari stasiun terdekat dengan rover bukan stasiun dengan kualitas data terbaik.
- VRS (Virtual Reference Stations) adalah layanan koreksi network RTK, dimana model koreksi yang dihitung mengacu kepada base yang sifatnya virtual. Jenis layanan NRTK ini berbeda dengan MAX dan i-MAX dimana base yang dikenal sebagai master reference station memiliki bentuk fisik. Rover dari pengguna akan menerima koreksi dari base virtual yang dikonstruksi berdekatan dengan lokasi pengukuran. Posisi dari base virtual tersebut dapat berubah-ubah bergantung proses inisiasi antara rover dengan sistem NRTK BIG. Hal tersebut juga menjadi kelemahan dari sistem VRS dimana proses rekonstruksi base yang menjadi referensi akan berubah antar pengukuran walaupun pada titik yang sama.
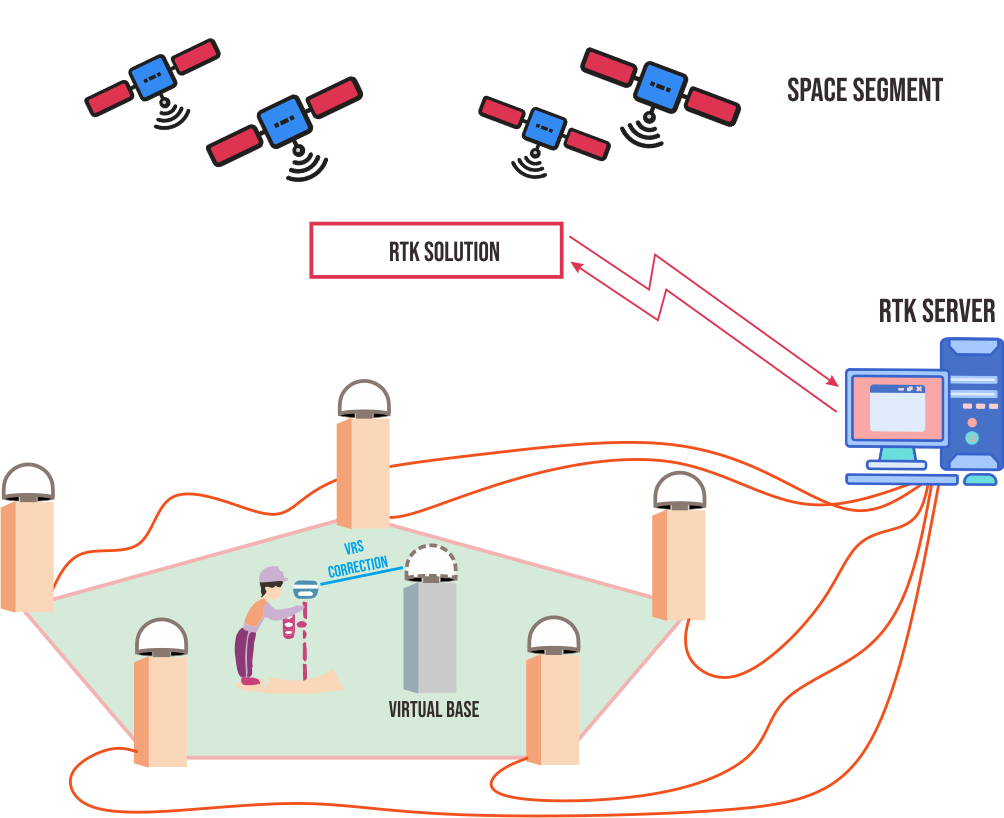
Gambar VRS (Virtual Reference Stations)

Gambar Nearest Base RTK
- Nearest Base RTK adalah layan koreksi single RTK, dimana koreksi dari rover didapatkan dari satu base Kualitas ketelitian dari koreksi tersebut sangat bergantung dengan jarak rover terhadap base.
Dalam kondisi ideal, jika diurutkan berdasarkan kualitas ketelitian yang bisa didapatkan oleh rover dari yang terbaik ke yang terendah dan kecepatan untuk mencapai ambiguitas fix oleh rover dari yang tercepat ke yang terlama maka urutan layanan koreksinya adalah sebagai berikut :

Kualitas layanan RTK BIG tentunya dipengaruhi juga oleh layanan jaringan telekomunikasi di lokasi survei.
Pada website nrtk.big.go.id, pengguna juga dapat melihat status konektivitas dari setiap stasiun secara real time bergantung pada kondisi site dan komunikasi di lokasi. Adapun keterangannya adalah sebagai berikut

 Stasiun offline atau tidak terhubung dan raw data tidak tersedia.
Stasiun offline atau tidak terhubung dan raw data tidak tersedia. Stasiun online dan raw data tersedia
Stasiun online dan raw data tersedia Stasiun online, ambiguitas dari 5 atau lebih satelit fix pada L1 dan L2, serta raw data tersedia.
Stasiun online, ambiguitas dari 5 atau lebih satelit fix pada L1 dan L2, serta raw data tersedia.


