
Monitoring Real-time Zenith Wet Delay (ZWD)
GNSS satellites transmit electromagnetic wave signals pass through a medium called the atmosphere. In the atmosphere the signal undergoes bending, so that the distance traveled from the satellite to the receiver on the earth's surface is not a straight distance, but the turning distance caused by the delay in the medium. The atmosphere itself in the case of GNSS signal propagation are divided into two parts, namely the dispersive part and the non-dispersive part. The dispersive part so-called the ionosphere is a medium where the speed of delay of electromagnetic waves is highly dependent on the frequency of the wave. while the dispersive part or known as the troposphere, the speed of electromagnetic waves does not depend on the frequency of the wave.
In positioning with GNSS, the delay that occurs in either the ionosphere or the troposphere causes a systematic error in the resulting position. So to avoid this, a systematic way is needed as well. For example, to avoid the ionospheric effect, users usually take advantage of dual-frequency receivers so that the ionospheric effect can be reduced by applying the ionosphere free linear combination process. While to reduce the effect on the troposphere the user can usually make corrections with existing models, or to get better positional accuracy, the total error that occurs in this medium is estimated simultaneously with other parameters when positioning is carried out. The total error in the tropospheric medium is in practice known as the Zenith Total Delay (ZTD). ZTD itself consists of two parts, namely: Zenith Wet Delay (ZWD), and Zenith Hydrostatic Delay (ZHD). The relationship between ZTD, ZWD, and ZHD is expressed in a mathematical relationship as follows.
ZTD = ZWD + ZHD
The ZHD value is usually obtained through modelling. As in this RT-GNSS processing, ZHD is obtained using the Saastamoinen model as follows (Saastamoinen, 1972)
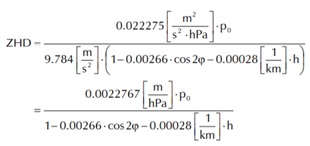
ρ_0= pressure on the surface (hPa), the value of ρ_0 can be obtained from the meteo sensor installed in the field or can be obtained through a model (example in this calculation using the GPT2w model)
𝜑 = latitude of the observation station
h = geodetic height of the observation station
After the ZHD value is known, the next remaining value is the ZWD value. This ZWD value is estimated along with other parameters in this RT-PPP processing. The mapping function used in both ZHD and ZWD is the Global Mapping Function (GMF).
The data source in the ZWD realtime calculation process comes from the 1 second data stream of each Ina-CORS station.
In the positioning using GNSS, ZWD is a source of error that must be addressed properly. For meteorological needs, the ZWD contains important information related to the content of water vapor in the air (Precipitable Water Vapor - PWV) which can be used for weather forecasts. So, this ZWD must be estimated properly.
In the PWV determination, the ZWD value can be obtained from the estimation process, simultaneously with other parameters through PPP (Precise Point Positioning) process as in this RT-PPP processing.
PWV is obtained by multiplying ZWD by the constant 𝞟
PWV = 𝞟 (Tm) x ZWD

No content.
No content.

